机械臂关节坐标变换介绍
1.介绍
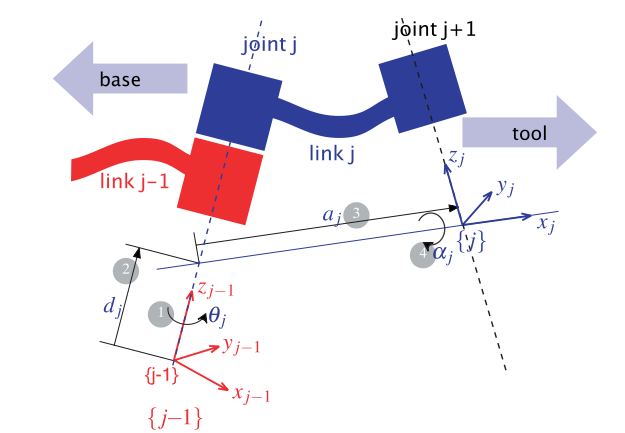
如果把机械臂每个关节看作一个空间坐标系,每个相邻坐标系之间以连杆相连,则必须建立两个连杆之间的描述,如下图所示。
- 假设机械臂有N个关节,则机械臂拥有N+1个连杆(基座为连杆0);
- 关节J+1的坐标系{j}的确立:
- 以上一关节J和关节J+1的旋转轴($z_{j-1}$和$z_j$)的法线作为{j}的x轴$x_j$
- z轴、x轴确立,用右手定则确定y轴
- DH模型参数确定
- $x_{j-1}$与$x_j$的夹角为$\theta_{j}$
- 坐标系{j-1}原点与坐标系{j}原点投影到$z_{j-1}$轴上点的距离$d_j$
DH模型
机械臂建立数学模型(DH模型),需要对各个关节建立空间坐标系,并建立DH参数表
| 连杆号 | $\theta_j$ | $d_j$ | $a_j$ | $\alpha_j$ |
|---|---|---|---|---|
| 连杆1 | … | … | … | … |
| 连杆2 | … | … | … | … |
| 连杆3 | … | … | … | … |
| … | … | … | … | … |
\[^{j - 1}{A_j}({\theta _j},{d_j},{\alpha _j},{a_j}) = \left[ {\begin{array}{*{20}{c}}{\cos {\theta _j}}&{ - \sin {\theta _j}\cos {\alpha _j}}&{\sin {\theta _j}\sin {\alpha _j}}&{{a_j}\cos {\theta _j}}\\{\sin {\theta _j}}&{\cos {\theta _j}\sin {\alpha _j}}&{ - \cos {\theta _j}\sin {\alpha _j}}&{{a_j}\sin {\theta _j}}\\0&{\sin {\alpha _j}}&{\cos {\alpha _j}}&{{d_j}}\\0&0&0&1\end{array}} \right]\]空间坐标-旋转平移公式